


როგორც მნიშვნელოვანი სატრანსპორტო მოწყობილობა მკვრივი საწყობისთვის, ინტელექტუალური პლატაზე ტიპის ოთხმხრივი სატრანსპორტო მანქანა არის ინტელექტუალური გზამკვლევი ავტომატური უკუსვლა და სატრანსპორტო სატრანსპორტო მოწყობილობა. ელექტრული კონტროლის სისტემის კონტროლის ქვეშ, ის ზუსტად აფიქსირებს თითოეულ შემავალ და გამომავალ სადგურს ციფრული ტექნოლოგიების საშუალებით, როგორიცაა შიფრები, RFID, ფოტოელექტრული სენსორები და აღჭურვილია ინტელექტუალური დაგეგმვის სისტემით. მასალების მიღების შემდეგ ის ავტომატურად მოძრაობს ტრანსპორტირებისთვის წინ და უკან. პლატაზე ოთხმხრივი მანქანა არ საჭიროებს ადამიანის მუშაობას, სწრაფ სიჩქარეს და დაზვერვის მაღალ დონეს, რომელიც შესაფერისია სხვადასხვა ლოგისტიკური შენახვის სისტემებისთვის, შეუძლია ხელი შეუწყოს ერთეული მასალების ბრტყელი ავტომატური ტრანსპორტირების სწრაფ განხორციელებას. დაგეგმვის ინტელექტუალური სისტემებით, მრავალფენიანი და მრავალსატრანსპორტო საშუალების ერთობლივი პარალელური ოპერაციები ხორციელდება ზუსტი და ეფექტური მუშაობის რეჟიმების მისაღწევად, რაც უზრუნველყოფს ახალ ლოგისტიკურ გადაწყვეტილებებს საწარმოს ლოგისტიკური შენახვის სისტემებისთვის.
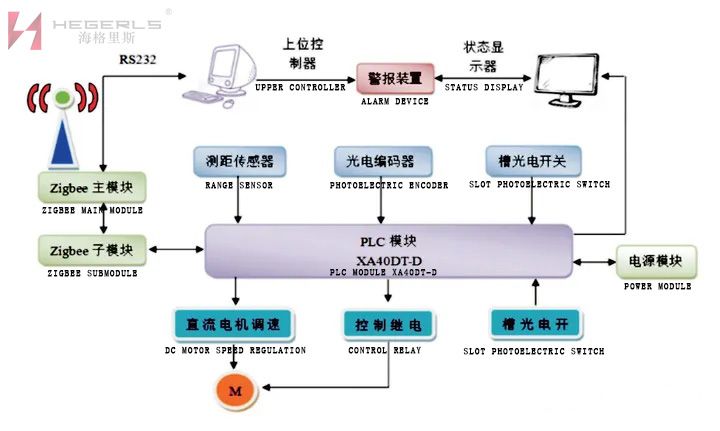
ძირითადი სირთულეები და ძირითადი პუნქტები ინტელექტუალური უჯრის ოთხმხრივი სატრანსპორტო საშუალების შენახვის სისტემის დანერგვაში მდგომარეობს ტექნიკის საიმედოობაში, კომუნიკაციისა და პოზიციონირების ტექნოლოგიაში, დაგეგმვის სისტემაში და ა.შ. კონკრეტულად, ტექნიკის საიმედოობის თვალსაზრისით, Hebei Woke HEGERLS ძირითადად აღწევს პროდუქტის საიმედოობას. სამი ასპექტიდან. პირველ რიგში, 16 სენსორი არის კონფიგურირებული მანქანის ძარაზე, რათა უზრუნველყოს მანქანის მუშაობის რეალურ დროში მონიტორინგი; შემდეგი, აირჩიეთ სტანდარტული PLC Siemens s7-200 SMATER სერიიდან კონტროლის სტაბილურობის გასაუმჯობესებლად. გარდა ამისა, HEGERLS-ის პლატაზე ოთხმხრივი შატლი მთლიანობაში იღებს მოდულურ დიზაინს, რაც უფრო მოსახერხებელ და ეფექტურს ხდის კომპონენტების ჩანაცვლებას, როდესაც ისინი ვერ ხერხდება. ამავდროულად, სხვა პატარა მანქანებისთვისაც მოსახერხებელია მხარდაჭერის უზრუნველყოფა. ყველა სტრუქტურული კომპონენტი დამოუკიდებლად არის შემუშავებული და წარმოებული Hebei Woke-ის მიერ, მკაცრად აკონტროლებს ხარისხს და სიზუსტეს.
კომუნიკაციისა და პოზიციონირების ტექნოლოგიის თვალსაზრისით, მაღალი სიმკვრივის საქონელი და თაროები ზოგადად ერევა საკომუნიკაციო სიგნალების გადაცემაში, რითაც გავლენას ახდენს პლატაზე ოთხმხრივი შატლის და მისი სისტემის მონაცემთა გაცვლის ეფექტურობაზე, რაც იწვევს არაზუსტ პოზიციონირებას და პოზიციის დაკარგვას. სხვადასხვა ფაქტობრივი სიტუაციების მიხედვით, Hebei Woke-მა შეარჩია ენკოდერის პოზიციონირება, ლაზერული პოზიციონირება, შტრიხკოდის/ორგანზომილებიანი კოდის პოზიციონირება, RFID პოზიციონირება და სხვა პოზიციონირების მეთოდები საწყობში ოთხმხრივი სატრანსპორტო საშუალებების უწყვეტი როუმინგის განსახორციელებლად, ჩარევის გასაუმჯობესებლად. სატრანსპორტო საშუალების უნარს, საშუალებას აძლევს მას ავტომატურად ჩაიტვირთოს ბალანსი და ამით აღმოფხვრას ერთი ავარიის წერტილი.
განრიგის სისტემების თვალსაზრისით, მხოლოდ მრავალ სატრანსპორტო საშუალების დაგეგმვის სისტემის დანერგვით შეიძლება მნიშვნელოვნად გაუმჯობესდეს ოთხმხრივი შატლის მანქანების გამოყენებადობა. HEGERLS-ის ოთხმხრივი შატლის მრავალსატრანსპორტო განრიგის სისტემა მოიცავს ოთხ ასპექტს: კოსმოსური მოძრაობის კონტროლი, ამოცანების განაწილება, აღჭურვილობის მუშაობის წარუმატებლობის ანალიზი და ბილიკის დაგეგმვა.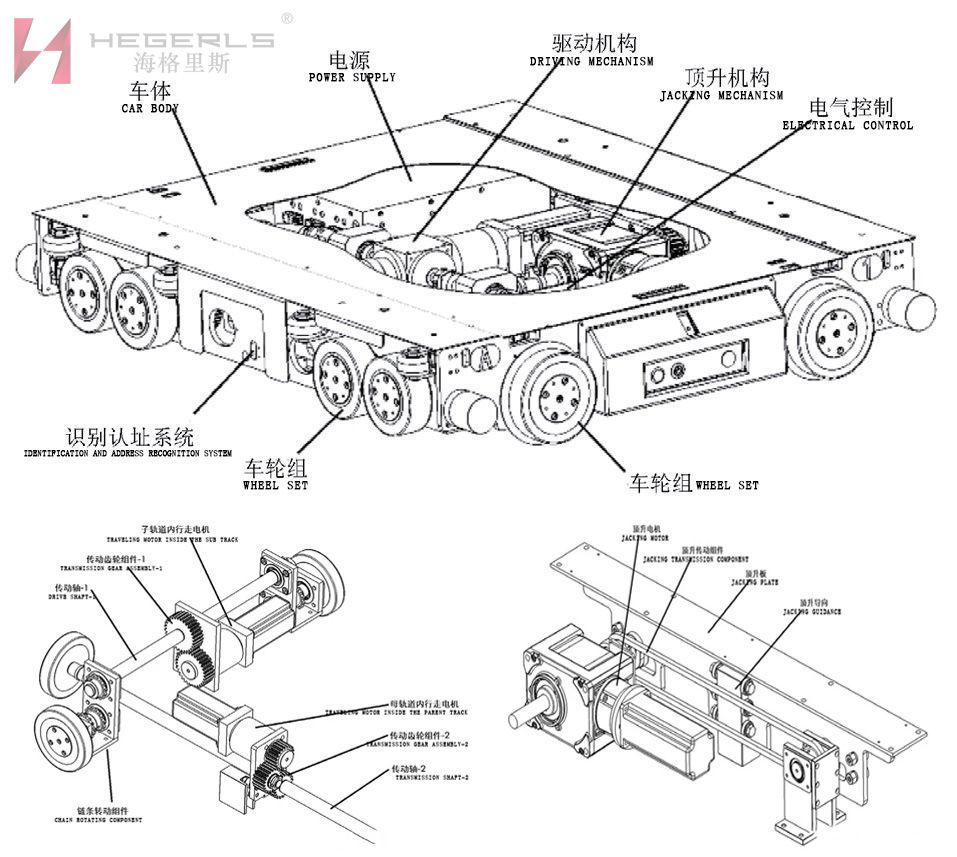
Hebei Woke-ის მიერ დამოუკიდებლად შემუშავებული და წარმოებული HEGERLS პლატაზე ოთხმხრივი შატლის მანქანის საერთო მექანიზმის დიზაინი ასევე განსხვავდება სხვა მწარმოებლებისგან. HEGERLS-ის პლატაზე ოთხმხრივი შატლის მანქანის ძირითადი მექანიზმის დიზაინი შემდეგია:
დავალების მოთხოვნების მიხედვით, ოთხმხრივი მანქანა თანამშრომლობს ორმხრივ ლიფტთან, რათა შეასრულოს საოპერაციო ამოცანები თაროების სხვადასხვა ფენებში და ტვირთის ზოლში სარბენი ლიანდაგის გავლით. საწყობის მონიტორინგის სისტემის კონტროლისა და განრიგის ქვეშ, მთელ მკვრივ საწყობს შეუძლია მიაღწიოს მრავალ ფენის და მრავალსატრანსპორტო საშუალების ერთდროულ მუშაობას. თითოეულ ოთხმხრივ მანქანას შეუძლია ატვირთოს ინფორმაცია, როგორიცაა მდებარეობა, სიჩქარე, ელექტროენერგია, ხელმისაწვდომობა, ხარვეზები და სამუშაო პირობები ინფორმაციის მართვის სისტემაში მუშაობის დროს; ოთხმხრივ მანქანას აქვს ისეთი ფუნქციები, როგორიცაა ნაყარი შენახვა და მოპოვება, ტვირთის გადაადგილება და პალეტების დათვლა, რაც იძლევა მასალის სწრაფ მიწოდებას და მარაგის მართვას; იგი შიგნიდან აღჭურვილია დაბრკოლებების თავიდან აცილების ფუნქციით და ხარვეზის განგაშის სწრაფი ფუნქციით, რომელსაც შეუძლია უზრუნველყოს უსაფრთხოების დაცვა და ხარვეზის შესახებ ინფორმაციის დროული გამოხმაურება. ტექნიკის სისტემის თვალსაზრისით, ოთხმხრივი მანქანა ძირითადად შედგება ისეთი კომპონენტებისგან, როგორიცაა ჩარჩო, ამწევი მექანიზმი, მამოძრავებელი მექანიზმი, ბორბლების ჯგუფი, ელექტრომომარაგება, ელექტრო კონტროლი და ა.შ.
1) ავტომობილის სტრუქტურა
მოდულური დიზაინის ტექნოლოგია გამოიყენება ოთხმხრივი ავტომობილის კორპუსის სტრუქტურაზე, რომელიც იქმნება მაღალი ხარისხის ფოლადის კომბინაციით. სატრანსპორტო საშუალების დაპროექტებული დატვირთვის მოცულობა არის 1500 კგ ან მეტი, ხოლო უსაფრთხოების მინიმალური კოეფიციენტი რეკომენდირებულია იყოს 1.6. მასალის მოსავლიანობა არის 2,75 მპა; მანქანის სხეულის ოთხმხრივი სტრუქტურა ოპტიმიზირებულია მთელი მანქანის საიმედოობისა და სტრუქტურის მსუბუქი წონისთვის.
2) ჯეკ მექანიზმი
ავტომობილის ოთხმხრივი ექსპლუატაცია მოითხოვს მრავალჯერადი ზემოდან ქვევით და უკუღმა ქმედებებს და უნდა შეიქმნას მექანიკური მექანიზმი ან ჰიდრავლიკური ზემოდან ქვემოთ მოწყობილობა. მექანიკური სტრუქტურის უსაფრთხოების, საიმედოობისა და გამძლეობის გათვალისწინებით, რეკომენდებულია აწევის 40 მმ და აწევის დრო 3-5 წამი. ოთხმხრივი მანქანა ასრულებს ერთ ოპერაციულ ციკლს პლატას აწევით და დაწევით და საქონლის აწევის უკან. ექსპლუატაციის ეფექტურობის გასაუმჯობესებლად, აუცილებელია უზრუნველყოს, რომ ოთხმხრივი სატრანსპორტო საშუალება სწრაფად დაიწიოს და უკან დაიხიოს ექსპლუატაციის პროცესში, რათა შეამციროს მუშაობის ციკლი.
3) ამძრავი მექანიზმი და ბორბლები
ოთხმხრივი მანქანის მართვის მექანიზმი იყენებს სერვო ძრავის ძრავას, პლანეტარული შენელებას და კომუტატორს, რათა ხელი შეუწყოს სწრაფ კომუტაციას ორივე მიმართულებით. ნორმალურ ოპერაციულ პირობებში, დატვირთული სამუშაო სიჩქარე არის 1,4 მ/წმ~1,6 მ/წმ, ხოლო სრული დატვირთვის ოპერაციული სიჩქარე 1,0 მ/წმ~1,2 მ/წმ; თაროზე ჰორიზონტალურად გაშვებისას, ოთხმხრივი მანქანა იყენებს 4 ბორბალს X მიმართულებით და 8 ბორბალს Z მიმართულებით. 8-ბორბლიანი (მამოძრავებელი და ამოძრავებული ბორბლების კომბინაცია) გადაცემის რეჟიმი არჩეულია სისტემის დიზაინის მოთხოვნების დასაკმაყოფილებლად, რაც უზრუნველყოფს ავტომობილის სიარულის სტაბილურობას, ხოლო შიდა მექანიკური სისტემის სირთულეს ამცირებს. როდესაც ოთხმხრივი მანქანა მოძრაობს, მისი ბორბლები ექვემდებარება ხანგრძლივ ხახუნს და საჭიროებს აცვიათ მდგრად ბორბლებს. შესრულების ტესტირების შემდეგ, პოლიურეთანის ბორბლები შეირჩევა გამძლეობისთვის, ხმაურის შესამცირებლად და მუშაობის სტაბილურობის უზრუნველსაყოფად.

Hagrid HEGERLS პალეტის ოთხმხრივი შატლის მოქნილი მრავალშრიანი და მრავალსატრანსპორტო საშუალების მუშაობის რეჟიმი მნიშვნელოვნად აუმჯობესებს შემომავალი და გამავალი ოპერაციების ეფექტურობას, გადაჭრის ბოსტნეულ პრობლემას ტრადიციული სამგანზომილებიანი საწყობებში, სადაც სტეკერს შეუძლია შემოსვლა და გასვლა მხოლოდ ერთ ზოლში. . ბოლო წლებში, საშინაო და უცხოური სასაწყობო ბაზრების რეალური საჭიროებიდან გამომდინარე, Hebei Woke-მა შეიმუშავა პლატაზე ოთხმხრივი შატლის მანქანები ტექნოლოგიური უპირატესობებით, როგორიცაა ახალი გარეგნობა, სრული ფუნქციები, უსაფრთხოება და საიმედოობა. გარდა შიდა და უცხოური გაყიდვების შემდგომი სერვისის სისტემებისა, მომავალში, Hebei Woke მტკიცედ გაითავისებს ინტელექტუალური საწყობის განვითარების ძლიერ იმპულსს, ყოველთვის დაიცავს მომხმარებელთა მოთხოვნის ორიენტაციას და გააგრძელებს მაღალი ინტელექტისა და გადაწყვეტილების მიღებას მომხმარებელს ინტეგრირებული ინტელექტუალური. სასაწყობო საერთო გადაწყვეტა.
გამოქვეყნების დრო: მაისი-19-2023