



საწყობში არის სხვადასხვა ტიპის შესანახი თაროები და შენახვისა და მოპოვების მეთოდები ძირითადად იყოფა შემდეგ კატეგორიებად, მათ შორის ხელით შენახვა და მიღება, სატვირთო მანქანის შენახვა და მიღება და ავტომატური შენახვა და მიღება. დღესდღეობით, ბევრ საწარმოს სურს განახორციელოს საწყობის ავტომატური ფუნქციონირება, ამიტომ მათ სურთ გამოიყენონ საწყობის ავტომატური თაროები. მაგალითად, ოთხმხრივი მანქანის თარო არის ერთგვარი ავტომატური შენახვის თარო. როგორ შემოდის და გამოდის ოთხმხრივი შატლი AGV საწყობში? საწყობი მძიმე თაროების წარმოების ქარხანა Haigris გაანალიზებული.

ოთხმხრივი შატლის საწყობი
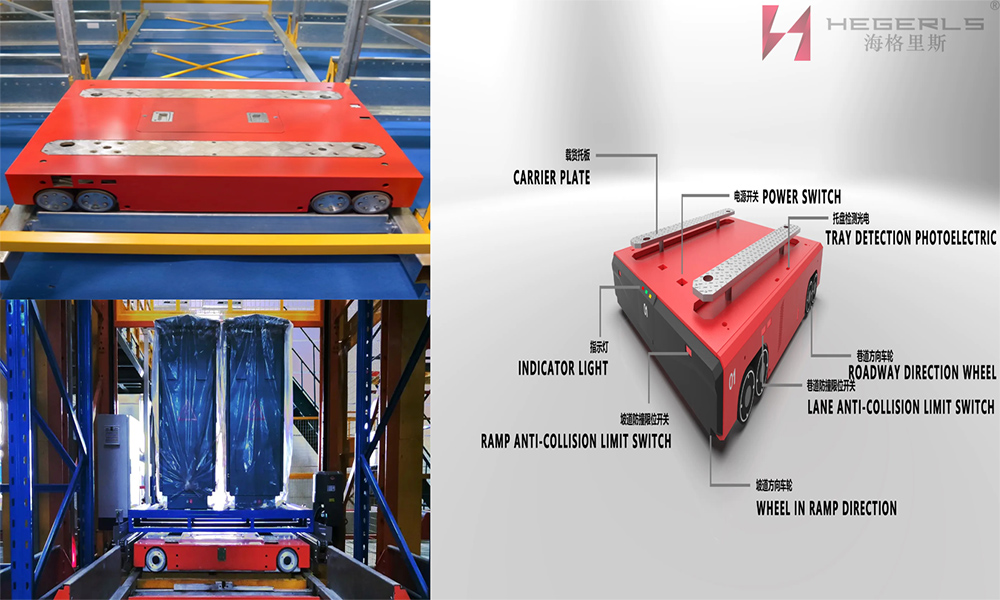
ოთხმხრივი შატლის მანქანა აღჭურვილია 12 ბორბლით, რომელსაც შეუძლია მგზავრობა ოთხი მიმართულებით ლიანდაგის სიბრტყის გასწვრივ და თავისუფლად მიაღწიოს საწყობის თვითმფრინავის ნებისმიერ სატვირთო სივრცეს. ოთხმხრივი შატლი ამოძრავებს ორივე მხარეს ბორბლებს ერთდროულად, რათა მანქანის კორპუსი არ გადახრის ექსპლუატაციის დროს და მას შეუძლია მონაცვლეობით იმოძრაოს გრძივი და განივი რელსების გასწვრივ სამგანზომილებიან თაროზე.

ამავდროულად, ოთხმხრივი შატლი არის ინტელექტუალური მართვის მოწყობილობა, რომელსაც შეუძლია არა მხოლოდ გრძივი, არამედ გვერდითი სიარული. ოთხმხრივ შატლს აქვს მაღალი მოქნილობა, შეუძლია შეცვალოს სამუშაო გზა სურვილისამებრ და შეცვალოს სისტემის სიმძლავრე შატლის მანქანების რაოდენობის გაზრდით ან შემცირებით. საჭიროების შემთხვევაში, სისტემის პიკურ მნიშვნელობაზე რეაგირება შესაძლებელია სატრანსპორტო საშუალების სამუშაო გუნდის დაგეგმვის რეჟიმის დადგენით, შესვლისა და გასასვლელის ოპერაციების შეფერხების გადაჭრით და ასევე შეიძლება შეიცვალოს ერთმანეთთან, როდესაც შატლი ან ლიფტი მარცხდება, სხვა შატლის ან ლიფტების გაგზავნა შესაძლებელია დისპეტჩერიზაციის სისტემის მეშვეობით, რათა გააგრძელონ ოპერაციის დასრულება სისტემის სიმძლავრეზე ზემოქმედების გარეშე. ეს მოწყობილობა განკუთვნილია როგორც დაბალი ნაკადის და მაღალი სიმკვრივის შესანახად, ასევე მაღალი ნაკადის და მაღალი სიმკვრივის შესანახად. მას შეუძლია მიაღწიოს უფრო მეტ ეფექტურობას, ხარჯებს და რესურსებს.
როგორ შემოდის და გამოდის ოთხმხრივი შატლი AGV საწყობში?

1) სასაწყობო მეთოდი
ა) ინტელექტუალური ოთხმხრივი შატლის ტექნიკოსები ჯერ ჩართებენ ინტელექტუალურ ოთხმხრივ შატლს და ამზადებენ მას. ინტელექტუალური ოთხმხრივი შატლი ლოდინის რეჟიმშია;
ბ) ინტელექტუალური ოთხმხრივი შატლის არჩევის ადგილმდებარეობის დადასტურების შემდეგ, WCS დაგეგმავს სამგზავრო მარშრუტს ინტელექტუალური ოთხმხრივი შატლის ამჟამინდელი მდებარეობისა და დანიშნულების ადგილის მიხედვით, შემდეგ კი პერსონალი ანაწილებს საქონელს ინტელექტუალურ ოთხმხრივ სადგურზე. Shuttle მეშვეობით WCS;
გ) ინტელექტუალური ოთხმხრივი შატლი იწყებს მიწოდების დავალების შესრულებას მიღებული დავალების ბრძანების მიხედვით;
დ) გადაკვეთის ლიანდაგზე ინტელექტუალური ოთხმხრივი შატლი გადაადგილების რეჟიმში მოძრაობს რეალურ მანძილზე. მართვის პროცესში ის განუწყვეტლივ ასკანირებს ტრასებს, რომლებზეც გადის მანქანის სხეულის ქვედა ნაწილი. ყოველი გადაკვეთის პოზიცია, რომელსაც ის გადის, ის განსჯის და კალიბრირებს მანძილს, რომელსაც ის ატარებს ტრასების სკანირებით. როდესაც ის დანიშნულების ადგილთან ახლოს არის, ის კარგად არეგულირებს პარკირების პოზიციას გვერდითი ლაზერული სენსორის მეშვეობით პარკირების პოზიციის ზუსტი განლაგების მისაღწევად;
ე) ქვეარხში ინტელექტუალურ ოთხმხრივ შატლს შეუძლია სკანირება მოახდინოს ჯვარედინი ტრასისა და გვერდითი კალიბრაციის სარკის რეფლექტორზე, განსაჯოს და შეამოწმოს მართვის მანძილი წერტილის პოზიციის სკანირებით და მიაღწიოს ზუსტ პოზიციონირების კონტროლს ქვეარხში დანიშნულების ადგილამდე მისასვლელად;
ვ) როდესაც ინტელექტუალური ოთხმხრივი შატლი მიდის შერჩეულ კრეფის პოზიციაზე, პლატა ეშვება, საქონელი მოთავსებულია თაროზე და WCS სისტემა ეცნობება მიტანის დავალების შესრულების შესახებ;
ზ) ინტელექტუალური ოთხმხრივი შატლი აგრძელებს დავალების ინსტრუქციების მიღებას ან ბრუნდება ლოდინის ზონაში.
2) მიწოდების მეთოდი
ა) ინტელექტუალური ოთხმხრივი შატლის ტექნიკოსები ჯერ ჩართებენ ინტელექტუალურ ოთხმხრივ შატლს და ამზადებენ მას. ინტელექტუალური ოთხმხრივი შატლი ლოდინის რეჟიმშია;
ბ) ინტელექტუალური ოთხმხრივი შატლის არჩევის ადგილის დადასტურების შემდეგ, WCS დაგეგმავს მართვის მარშრუტს ინტელექტუალური ოთხმხრივი შატლის ამჟამინდელი მდებარეობისა და დანიშნულების ადგილის მიხედვით, შემდეგ კი პერსონალი გაუგზავნის კრეფის დავალებას ინტელექტუალურ ოთხეულს. - გზატკეცილი WCS-ით;
გ) ინტელექტუალური ოთხმხრივი შატლი იწყებს საქონლის აღებას მიღებული დავალების ბრძანების მიხედვით;
დ) გადაკვეთის გზაზე ინტელექტუალური ოთხმხრივი შატლი გადაადგილების რეჟიმში მოძრაობს რეალურ მანძილზე. მართვის პროცესში ის განუწყვეტლივ ასკანირებს ტრასებს, რომლებზეც გადის მანქანის სხეულის ქვედა ნაწილი. ყოველი გადაკვეთის პოზიცია, რომელსაც ის გადის, ის განსჯის და ამოწმებს მანძილს, რომელსაც ის ატარებს ტრასების სკანირებით. დანიშნულების ადგილთან მიახლოებისას, ის კარგად არეგულირებს პარკირების პოზიციას გვერდითი ლაზერული სენსორის მეშვეობით, რათა მიაღწიოს ზუსტი პოზიციონირების კონტროლს და პარკირებას;
ე) ქვეარხში ინტელექტუალური ოთხმხრივი შატლის მანქანა სკანირებს გზაჯვარედინზე და გვერდითი კალიბრაციის სარკის რეფლექტორს, განსჯის და კალიბრირებს მგზავრობის მანძილს ამ წერტილების სკანირებით და ახორციელებს ქვეარხში ზუსტი განლაგების კონტროლს დანიშნულების ადგილამდე მისასვლელად. .
გამოქვეყნების დრო: სექ-19-2022