


სასაწყობო და ლოჯისტიკის ძირითად რგოლებში, როგორიცაა ინტელექტუალური მართვა, კრეფა, დახარისხება და ა.შ., გამოირჩევიან ყუთების შესანახი რობოტები, რომლებიც აკმაყოფილებენ მრავალ საჭიროებას. იმის გამო, რომ ყუთების შესანახი რობოტი არჩევს და ამუშავებს კონტეინერებს და არა თაროებს, თაროებს შორის ზოლები შეიძლება უფრო ვიწრო იყოს, შენახვის სიმკვრივე უფრო მაღალია, სივრცე დაზოგულია და შემდეგ საწყობის ქირა დაზოგულია; მისი "კონტეინერი ადამიანთან" ფუნქცია უფრო შესაფერისია აშენებული საწყობების უმეტესობისთვის, ტრანსფორმაციის ნაკლები სირთულეებით და უკეთესი მოქნილობით და თავსებადობით. ყუთის შესანახი რობოტის მუშაობის ობიექტია ერთეული მასალის ყუთი, რომელიც თაროზე პატარაა, ამიტომ ის უფრო მეტად შეესაბამება უფრო დივერსიფიცირებული SKU-ების განვითარების ტენდენციას და უფრო დახვეწილი ლოგისტიკური ოპერაციების განვითარებას. ბოლო წლებში იგი გამოიყენება ელექტრონული კომერციის ლოჯისტიკაში და მაღაზიების დისტრიბუციაში, წარმოებაში, ღრუბლოვან საწყობში და ბევრ სხვა სცენარში. 2020 წელს ყუთების შესანახი რობოტები იქცა ცხელ წერტილად შენახვისა და ლოგისტიკური აღჭურვილობის ძირითადი მწარმოებლების განვითარებაში და ინოვაციებისა და იმიტაციის სიცხის ტალღა იზრდება.

რობოტი ჰაგრის კუბო
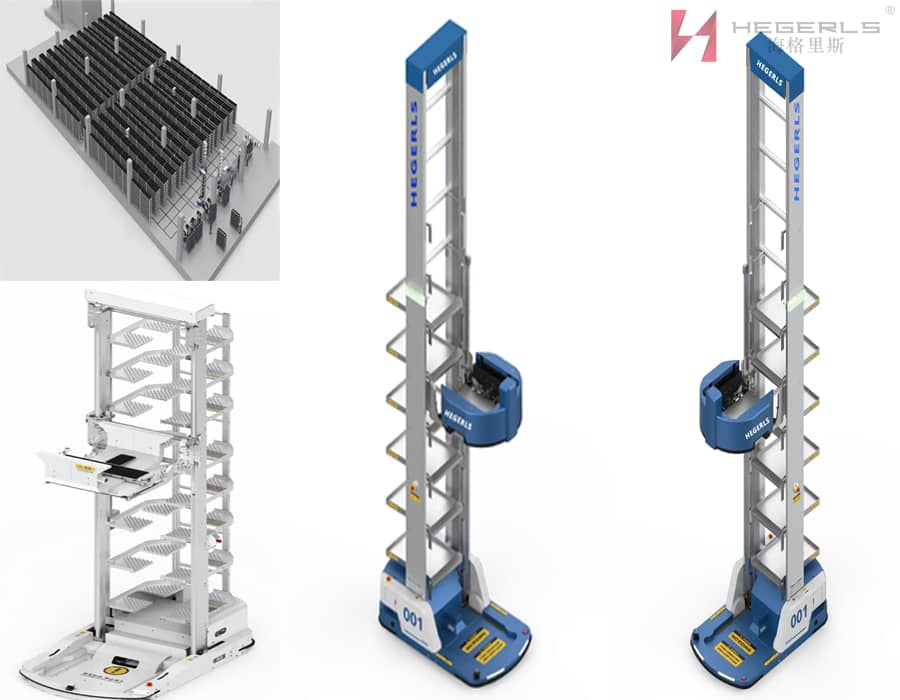
შემუშავებული და გამოცდილია რობოტი „კონტეინერი ადამიანამდე“ kubao of hears. რობოტს შეუძლია ზუსტად მოძებნოს შესაბამისი საქონელი შეკვეთის მოთხოვნების შესაბამისად. ამავდროულად, უწყვეტი გამეორებისა და პროდუქტის ინოვაციების მეშვეობით, აქამდე ამოქმედდა რამდენიმე კუბაო რობოტი: მრავალშრიანი ურნის რობოტი hels A42, ორმაგი ღრმა ურნის რობოტი heells a42d, მუყაოს დახარისხება რობოტი heells a42n, ტელესკოპური ამწევი ურნის რობოტი heells a42t. და ლაზერული სლემის მრავალშრიანი ურნის რობოტი აქვს A42 slam, თანდათანობით მოიცავს ყუთების შესანახი რობოტების გამოყენების სხვადასხვა სცენარს. ამასთან დაკავშირებით, დღეს ვისაუბრებთ დინამიური სიგანის რეგულირების ყუთის რობოტზე a42-fw.
Hegerls a42-fw, ყუთის ტიპის რობოტი დინამიური სიგანის რეგულირებით, იყენებს დინამიური სიგანის კორექტირების ჩანგლის ტექნოლოგიას, რათა დინამიურად დაარეგულიროს ჩანგლის სიგანე ყუთის ზომის მიხედვით, რათა უზრუნველყოს სხვადასხვა ზომის ყუთების კრეფისა და დამუშავების სამუშაოები. haiq ინტელექტუალური მართვის პლატფორმით, რომელიც დაფუძნებულია ძლიერ AI გამოთვლით ძალაზე, რობოტს შეუძლია ავტომატურად გამოყოს ოპტიმალური საცავის ადგილი ყუთის ზომის მიხედვით, უზრუნველყოს მინიმალური სივრცე შესანახ ადგილებს შორის და მაქსიმალურად გამოიყენოს თაროზე შენახვის ადგილი. იმის მიხედვით, რომ healls a42-fw შეუძლია გაზარდოს კონტეინერების რაოდენობა თითქმის 20%-ით ფიქსირებული ჩანგლის რობოტთან შედარებით, მას შემდეგ, რაც ის გამოიყენებოდა დიდ საწარმოებში.

ა42-fw დინამიური სიგანის რეგულირებადი ყუთის რობოტის მახასიათებლები
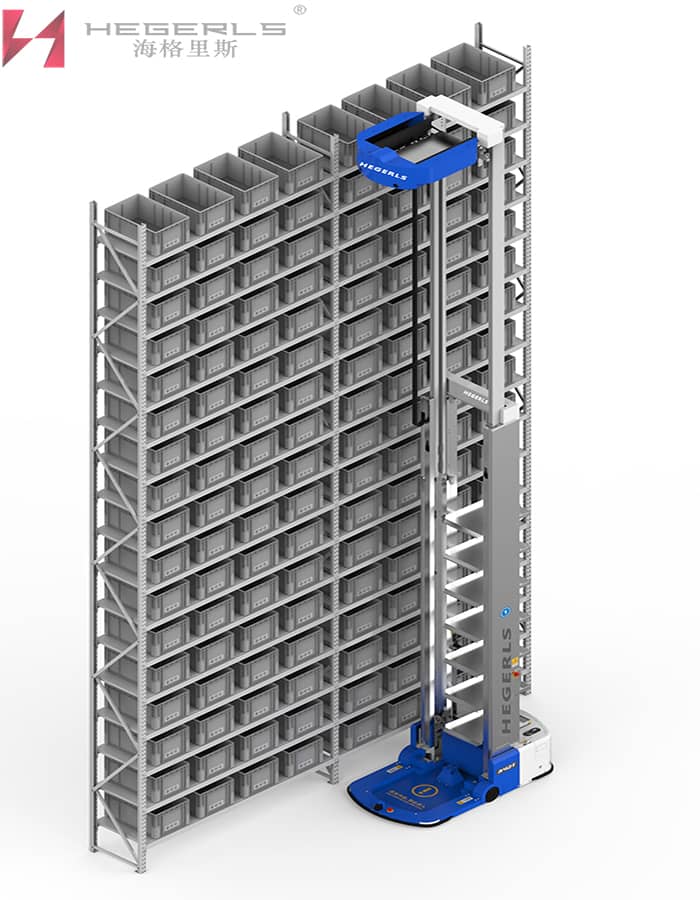
Kubao hegerls a42-fw დინამიური სიგანის რეგულირების ყუთის რობოტი დამოუკიდებლად ავითარებს დინამიური სიგანის კორექტირების ჩანგლის ტექნოლოგიას, დინამიურად არეგულირებს ჩანგლის ზომას ყუთის ზომის მიხედვით და ახორციელებს სხვადასხვა ზომის მუყაოს/ურნების კრეფას და დამუშავებას. როგორც ახალი ინტელექტუალური ლოგისტიკის დამუშავების მოწყობილობას, Eyells a42-fw-ს შეუძლია გააცნობიეროს ინტელექტუალური სიარული სათავსოში ყოველგვარი ტრეკის აღჭურვილობის დახმარების გარეშე და აქვს ავტონომიური ნავიგაციის, აქტიური დაბრკოლებების თავიდან აცილების და ავტომატური დამუხტვის ფუნქციები. ტრადიციულ AGV „თაროზე ადამიანზე“ გადაწყვეტასთან შედარებით, კუბაოს რობოტის კრეფის მარცვლიანობა უფრო მცირეა. სისტემის მიერ გაცემული შეკვეთის მოთხოვნების მიხედვით, ის ნამდვილად ახორციელებს ტრანსფორმაციას ტრადიციული „საქონლის მაძიებელი ხალხიდან“ ეფექტურ და მარტივ „საქონლის პირზე“ კრეფის ინტელექტუალურ რეჟიმში. სტეკერისა და ავტომატური სამგანზომილებიანი საწყობის გადაწყვეტილებებთან შედარებით, კუბაოს რობოტის სისტემას შეუძლია განახორციელოს ეფექტური განლაგება, განლაგების დაბალი საერთო ღირებულებით და უფრო ძლიერი მოქნილობით; ამავდროულად, hegerls a42-fw მხარს უჭერს სხვადასხვა ლოჯისტიკური აღჭურვილობის დამაგრებას, მათ შორის თაროებს, კონვეიერის ხაზებს, მექანიკურ მკლავებს, მრავალფუნქციურ სამუშაო სადგურებს და ა.შ. სასაწყობო ოპერაციების ოპტიმიზაციას ახდენს საწყობის სიმკვრივე და ახორციელებს სასაწყობო ინდუსტრიის ავტომატიზაციას და ინტელექტუალურ ტრანსფორმაციას. გამოსაყენებელი სცენარი: შესაფერისია მრავალი ზომის კონტეინერების შერეული შენახვის სცენარისთვის, როგორიცაა მუყაოს / მასალის ყუთის შერეული შენახვის საწყობის გამოყენების სცენარი, როგორიცაა ფეხსაცმელი და ტანსაცმელი, ელექტრონული კომერცია და ა.შ.


დინამიური სიგანის კორექტირების რობოტის უპირატესობები a42-fw
დინამიურად გაფართოებული ჩანგალი
Hegerls a42-fw, დინამიური სიგანის რეგულირების ყუთის რობოტს, შეუძლია ჩანგლების რეგულირება, რათა ჭკვიანურად მოერგოს მრავალ ზომის ურნებს და მუყაოს;
დინამიური მდებარეობა
Hegerls a42-fw, ყუთის რობოტი დინამიური სიგანის რეგულირებით, იყენებს haiq ალგორითმს ჩანგლების სიგანის დინამიურად დასარეგულირებლად, რათა ჭკვიანურად შეესაბამებოდეს შენახვის ოპტიმალურ პოზიციას;
სხეულის სიგანე 900 მმ
დინამიური სიგანის მარეგულირებელი რობოტის ა42-fw რობოტის ფიუზელაჟის სიგანე ზოგადად არის 900 მმ, ხოლო გზის სიგანე ვიწროა 1000 მმ-მდე;
თაროების ფენების მანძილი
დინამიური სიგანის რეგულირების ყუთის a42-fw რობოტის თაროებს შორის მანძილი შეიძლება შემცირდეს მინიმუმ 250 მმ-მდე. დაშორება აქ მიუთითებს იმაზე, რომ როდესაც არის კოდი, როდესაც არ არის კოდი, შეიძლება შემცირდეს 300 მმ-მდე;
ენერგიის მოხმარების სცენარი
Hegerls a42-fw, ყუთის ტიპის რობოტი დინამიური სიგანის კორექტირებით, ზოგადად იღებს 10s სწრაფი ენერგიის გაცვლის რეჟიმს, რათა დააკმაყოფილოს დიდი და საშუალო ზომის რეკლამების გადაუდებელი ენერგიის მოხმარების სცენარები;
სიმაღლე
აქ იგულისხმება პიკაპის სიმაღლე. მინიმალური პიკაპის სიმაღლის დიაპაზონი დინამიური სიგანის რეგულირების ყუთის რობოტი hewlers a42-fw არის 190 მმ;
3D ვიდეო ტექნოლოგია
Hegerls a42-fw, ყუთის ტიპის რობოტი დინამიური სიგანის რეგულირებით, იღებს კოდის გარეშე იდენტიფიკაციას საქონლის ასაღებად და განთავსებისთვის და იყენებს მოწინავე 3D ვიზუალური ამოცნობის ტექნოლოგიას.

ჰაგერლები - მომავლის შესახებ
ფაქტობრივად, ყუთების შესანახი რობოტების დიზაინიდან და წარმოებიდან თუ მსხვილი საწარმოების მიერ ყუთების შესანახი რობოტების გამოყენებით, ყუთების შესანახი რობოტების ტექნოლოგიას განვითარების განუზომელი პერსპექტივები აქვს:
ვიზუალური AI ტექნოლოგიის დახმარებით რობოტს შეუძლია ზუსტად განსაზღვროს სამიზნე მასალის ყუთის პოზიცია და სიმაღლე და გააცნობიეროს მასალის ყუთის ზუსტი კრეფა და განთავსება კოდის გარეშე. გარდა ამისა, მას ასევე შეუძლია მოქნილად დაუკავშირდეს სხვადასხვა შესანახ და ლოგისტიკურ აღჭურვილობას, მათ შორის როლიკებით, თაროებით, ლატენტური AGV, ხელოვნური სამუშაო სადგურით და სხვა საოპერაციო პლატფორმებით, რომლებსაც აქვთ ფუნქციების უფრო ფართო სპექტრი; ბილიკის ნავიგაციის ასპექტში, ყუთის შესანახი რობოტი განვითარდა ტრადიციული ორგანზომილებიანი კოდის ნავიგაციიდან ვიზუალურ სლემ ნავიგაციამდე და შემდეგ ლაზერულ ნავიგაციამდე. ტექნოლოგია სულ უფრო და უფრო მწიფდება, რომელსაც შეუძლია ეფექტურად მოიპოვოს გარე საქონელი და გარემოსდაცვითი ინფორმაცია, ავტომატურად თავიდან აიცილოს დაბრკოლებები და მოერგოს უფრო რთულ და ცვალებადი საწყობის სამუშაო გარემოს; თავდაპირველ ურნის რობოტს მხოლოდ ერთი ურნის პოზიცია ჰქონდა და კრეფის ეფექტურობა დაბალი იყო. Hegris-ის მიერ შემუშავებული ყუთის შესანახი რობოტიდან შეიქმნა რობოტი მრავალჯერადი ურნის ბუფერული პოზიციით, რომელსაც შეუძლია ერთდროულად შეაგროვოს რამდენიმე სამიზნე ყუთი, გააცნობიეროს უფრო მაღალი სიხშირის არჩევა და დამუშავება ნაკლები რობოტით და მნიშვნელოვნად გააუმჯობესოს მუშაობის ეფექტურობა და შენახვა. სიმჭიდროვე.
გამოქვეყნების დრო: ივლის-04-2022